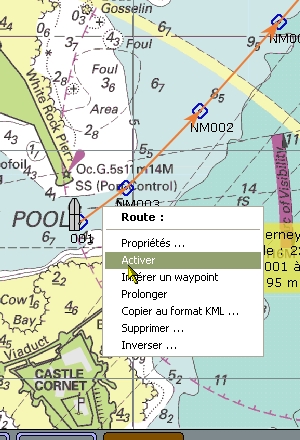
- Le panneau des données de navigation s'affiche à droite de
l'écran dés
qu'une route est activée.
- Un menu contextuel se cache dans ce panneau, accessible
par clic droit. On peut afficher au choix :
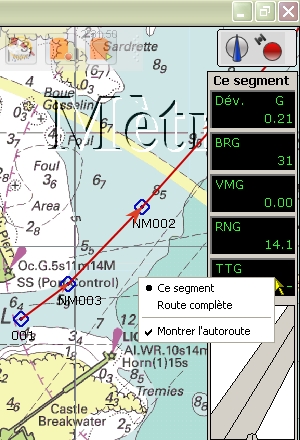
- Des données relatives à toute la route,
- Des données relatives au segment actif (celui qui se
finit au point de route clignotant).
- Si vous choisissez "Ce segment", vous avez de haut en bas :
- Dev : Distance (XTE), vers la gauche (G) ou
vers la droite (D), en mille nautique, entre le bateau et le segment de
la route.
- BRG :
Relèvement du prochain waypoint qui s'activera
- VMG : Vitesse par rapport au segment (Avec un signe "-"
si vous reculez).
- RNG :
Distance restant à accomplir jusqu'au prochain waypoint,
- TTG
: Durée restant à venir, pour aller au prochain waypoint,
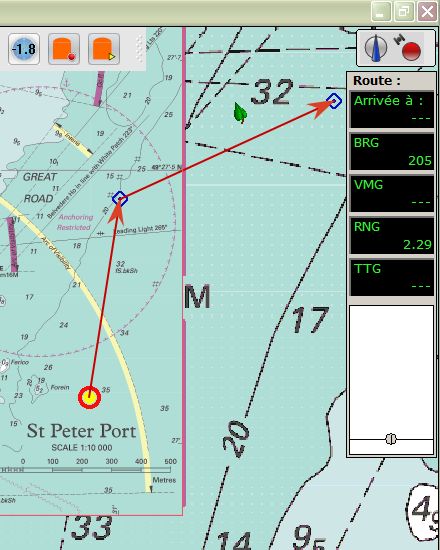
- Si vous choisissez "Route complète", vous avez de haut en
bas :
- Arrivée à : Horaire prévisible d'arrivée au point de
route final,
- BRG: Relèvement du point de route final,
- VMG : Vitesse de progression vers le point de route final
(Avec un signe - si vous reculez),
- RNG : Distance restant à courir jusqu'au point de
route final,
- TTG : Durée de navigation encore à venir pour
atteindre le point de route final.
- Le pavé de la route à suivre, présenté
sous forme d'autoroute, matérialise le cap suivi, et l'écart avec le
waypoint actif.
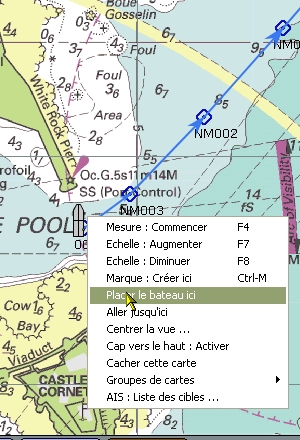
- Vous pouvez :
- le cacher avec l'item "Cacher l'autoroute" du menu
contextuel,
- le montrer avec l'item "Montrer l'autoroute".
|
Up
|
- Le panneau des données de
navigation associé à une route activée, comporte en fait 4 volets.
- Pour
afficher les différents volets, successivement, il faut cliquer,
successivement, dans une des cinq case noire du volet affiché.
- Ici à gauche, on a regroupé les 4
volets en une seule image. Mais, cela vous ne le verrez jamais sur
l'écran d'OpenCPN.
|
|